
Peripheral Configuration Guide
Peripheral Configuration Guide
Synchronized Device Documentation
This page corresponds to the synchronized Chinese source. Commands, JSON examples, API paths, field names, and screenshots are kept aligned with the Chinese device-side source documentation.
What This Page Covers
- Peripheral capability, supported device types, and wiring constraints.
- Web console configuration fields and recommended parameter values.
- PeriphExec integration, validation steps, and troubleshooting notes.
Source Reference
The detailed operational source is preserved below so implementation details stay exact while the English navigation, titles, and reading path remain available.
外设配置指南
本文档基于源码
include/core/PeripheralTypes.h、src/core/PeripheralManager.cpp、data/config/peripherals.json、include/core/FeatureFlags.h、include/core/interfaces/ISensorDriver.h、include/core/DriverRegistry.h和platformio.ini整理,用于说明外设配置系统支持的所有类型、引脚要求、参数含义、支持状态以及最佳实践。
当前版本提示
- 默认
esp32、esp32c3、esp32s3构建为精简版,保留 UART/I2C/SPI、GPIO、传感器、OLED/LCD、TM1637、Modbus 子设备等核心外设能力。 - 精简版默认关闭 NeoPixel/LED 屏、BLE、OTA、文件管理、日志查看、多用户/角色和 RuleScript;如需验证完整能力,请使用
esp32s3-full。 - 外设配置保存到
/config/peripherals.json,可在 Web 的“配置导入/导出”中按“外设配置”单独备份和恢复。 - 出厂
data/config/peripherals.json作为安全模板发布,硬件外设默认enabled: false;文档示例中的enabled: true表示完成接线核对后的目标状态。 - 传感器数据要作为外设执行事件触发来源时,需要先在外设执行中配置传感器采集动作,系统会将采集结果缓存为
ds:<外设ID>_<字段>数据源。 - Modbus 子设备由通信协议页管理,作为虚拟外设参与设备控制和外设执行,不占用本地 GPIO。
外设配置的 Web 入口如下。新增外设时先选类型,再填引脚和类型参数;批量迁移时优先通过文件管理或配置导入导出备份 peripherals.json。
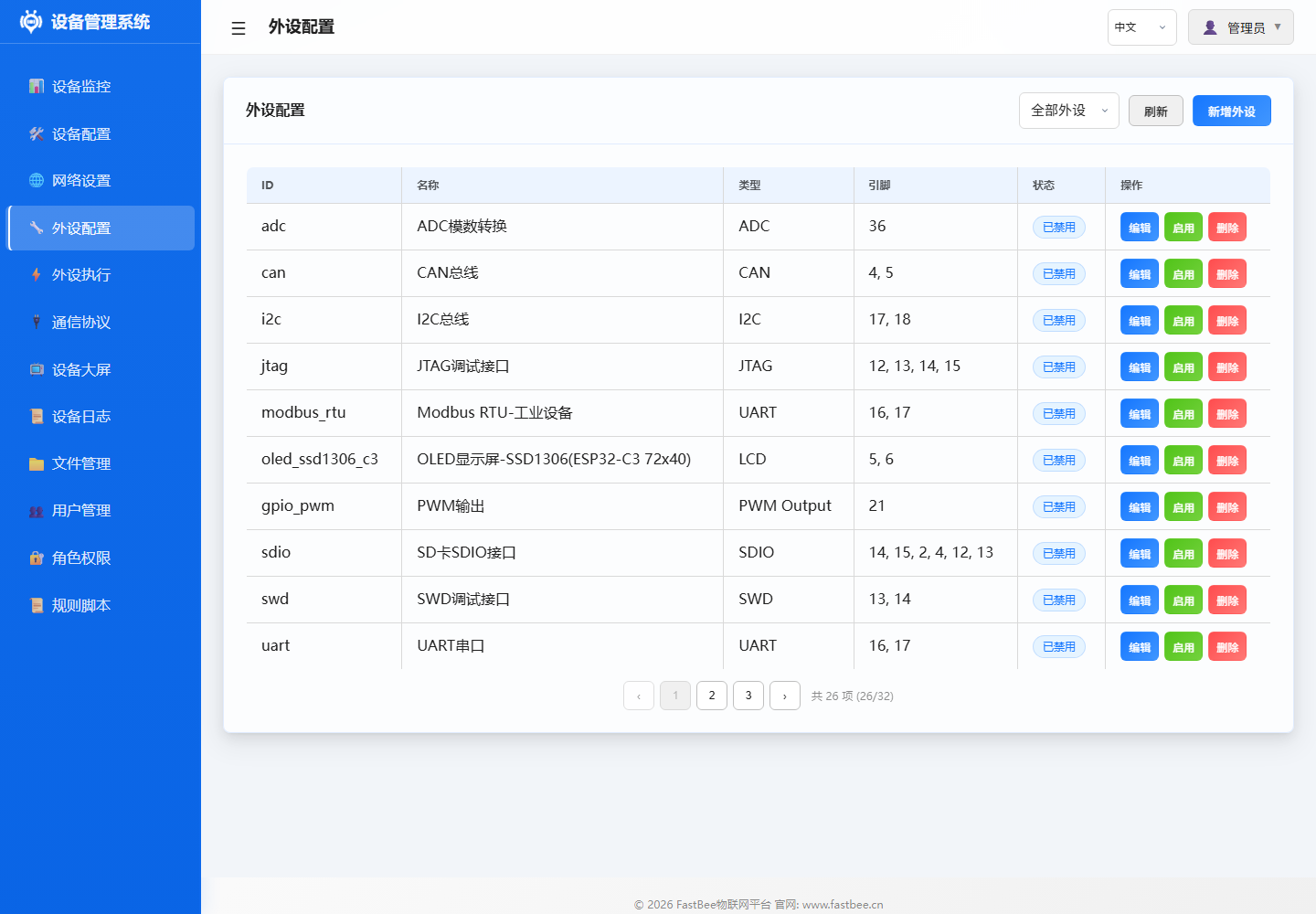


接入新模块时,不建议从 JSON 批量导入后立刻启用。更稳的顺序是先确认硬件和版本支持,再通过页面保存禁用配置,单项验证后再进入外设执行规则。

如果不确定应该选择哪个 type,先按上图从开关量、模拟量、总线设备、RS485 从站和显示输出五类入口收敛范围,再回到后文的类型 ID 表确认字段。

外设配置不是单个表单字段,而是一条从 Web 表单、JSON 文件、校验逻辑、运行时驱动到规则消费者的链路。现场导入配置后,建议按图中的顺序检查 id、type、pins、params、enabled 和版本能力开关,确认每一层都能解释当前运行状态。

如果只想快速判断某类外设需要哪些字段,可以先看参数矩阵,再回到后文的类型 ID 表和字段说明。矩阵里的“启用前检查”适合作为现场接线核对清单。
目录
- 1. 总览
- 2. 外设类型 ID 映射总表
- 3. 通信接口
- 4. GPIO 接口
- 5. 模拟信号接口
- 6. 调试接口
- 7. 专用外设
- 8. Modbus 外设
- 9. 虚拟/逻辑外设
- 10. 配置结构与字段说明
- 11. 功能编译开关(FeatureFlags)
- 12. 常见问题与排错
- 13. 最佳实践
- 14. 传感器驱动扩展(ISensorDriver)
1. 总览
外设配置系统采用"类型驱动 + 引脚占用校验 + 运行时状态"的三层模型:
- 配置层:
data/config/peripherals.json,冷启动从 LittleFS 加载。 - 管理层:
PeripheralManager单例,负责 CRUD、引脚冲突检测、硬件初始化/释放、通用读写接口。 - 驱动层:按类型分派到底层:
- GPIO 系列 →
pinMode/digitalWrite/ledcWrite - I²C/SPI/UART →
Wire/SPI/Serial - LCD/OLED → U8g2(
LCDManager) - TM1637 → 自写 bit-bang(
SevenSegmentDriver) - Modbus → 通过回调委托给
ModbusHandler
- GPIO 系列 →
约定:所有硬件操作统一经过 PeripheralManager,禁止在业务代码里直接 pinMode/digitalWrite,以避免引脚占用冲突和状态不一致。
2. 外设类型 ID 映射总表
| ID | 枚举常量 | 分类 | 显示名(中文) | 实现状态 | 引脚数 |
|---|---|---|---|---|---|
| 0 | UNCONFIGURED | —— | 未配置 | 占位 | 0 |
| 1 | UART | 通信接口 | 串口 | ✅ 已实现 | 2 (RX,TX) |
| 2 | I2C | 通信接口 | I2C 总线 | ✅ 已实现 | 2 (SDA,SCL) |
| 3 | SPI | 通信接口 | SPI 总线 | ✅ 已实现 | 4 (MISO,MOSI,SCK,CS) |
| 4 | CAN | 通信接口 | CAN 总线 | ⚠️ 配置框架就绪,驱动 TODO | 2 |
| 5 | USB | 通信接口 | USB 接口 | ⚠️ 配置框架就绪,驱动 TODO | 2 |
| 11 | GPIO_DIGITAL_INPUT | GPIO | 数字输入 | ✅ 已实现 | 1 |
| 12 | GPIO_DIGITAL_OUTPUT | GPIO | 数字输出 | ✅ 已实现 | 1 |
| 13 | GPIO_DIGITAL_INPUT_PULLUP | GPIO | 数字输入(上拉) | ✅ 已实现 / 按键默认类型 | 1 |
| 14 | GPIO_DIGITAL_INPUT_PULLDOWN | GPIO | 数字输入(下拉) | ✅ 已实现 | 1 |
| 15 | GPIO_ANALOG_INPUT | GPIO | 模拟输入 | ✅ 已实现(analogRead) | 1 |
| 16 | GPIO_ANALOG_OUTPUT | GPIO | 模拟输出 | ✅ 已实现(LEDC PWM 模拟) | 1 |
| 17 | GPIO_PWM_OUTPUT | GPIO | PWM 输出 | ✅ 已实现(LEDC) | 1 |
| 18 | GPIO_INTERRUPT_RISING | GPIO | 中断(上升沿) | 🟡 ISR 骨架存在,事件队列 TODO | 1 |
| 19 | GPIO_INTERRUPT_FALLING | GPIO | 中断(下降沿) | 🟡 ISR 骨架存在,事件队列 TODO | 1 |
| 20 | GPIO_INTERRUPT_CHANGE | GPIO | 中断(变化) | 🟡 ISR 骨架存在,事件队列 TODO | 1 |
| 21 | GPIO_TOUCH | GPIO | 电容触摸 | ⚠️ 芯片依赖;ESP32 classic 支持 | 1 |
| 26 | ADC | 模拟信号 | ADC | ✅ 已实现 | 1 |
| 27 | DAC | 模拟信号 | DAC | ✅ 已实现(仅 GPIO25/26,ESP32 classic) | 1 |
| 31 | JTAG | 调试 | JTAG 调试 | 🔘 仅类型标记,芯片级固定 | 4 |
| 32 | SWD | 调试 | SWD 调试 | 🔘 仅类型标记,芯片级固定 | 2 |
| 36 | LCD | 专用外设 | LCD/OLED 显示屏 | ✅ 已实现(U8g2:SSD1306/SH1106 等) | 2+ |
| 37 | SDIO | 专用外设 | SD 卡接口 | ⚠️ 配置框架就绪,驱动 TODO | 6 |
| 38 | SENSOR | 专用外设 | 通用传感器 (DHT/DS18B20) | ✅ 已实现(FASTBEE_ENABLE_SENSOR_DRIVER) | 1 |
| 39 | CAMERA | 专用外设 | 摄像头 | ⚠️ 配置框架就绪,驱动 TODO | 8 |
| 40 | ETHERNET | 专用外设 | 以太网 | ⚠️ 配置框架就绪,驱动 TODO | 4 |
| 41 | PWM_SERVO | 专用外设 | 舵机 | ✅ 已实现(LEDC) | 1 |
| 42 | STEPPER_MOTOR | 专用外设 | 步进电机 | ✅ 已实现(ULN2003 四相半步,非阻塞 Ticker) | 4 (IN1,IN2,IN3,IN4) |
| 43 | ENCODER | 专用外设 | 编码器 | ⚠️ 配置框架就绪,驱动 TODO | 2 |
| 44 | ONE_WIRE | 专用外设 | 单总线 | ✅ 通过 SENSOR 驱动链路实现(DS18B20) | 1 |
| 45 | NEO_PIXEL | 专用外设 | WS2812B 灯珠/灯带 | ✅ 已实现(ESP32 RMT,默认配置禁用) | 1 |
| 46 | RESERVED_46 | 兼容保留 | 保留位 | 🔒 旧版蜂鸣器类型占位,UI 不再展示 | 0 |
| 47 | SEVEN_SEGMENT_TM1637 | 专用外设 | TM1637 4 位数码管 | ✅ 已实现(FASTBEE_ENABLE_SEVEN_SEGMENT) | 2 (CLK,DIO) |
| 51 | MODBUS_DEVICE | Modbus | Modbus 子设备 | ✅ 已实现(不占 GPIO) | 0 |
| 60 | DEVICE_EVENT | 虚拟 | 设备事件发射源 | ✅ 已实现(无硬件) | 0 |
图例:✅ 完整实现且默认启用 / 🟡 部分实现 / ⚠️ 仅配置占位 / 🔒 默认禁用 / 🔘 仅类型标记
3. 通信接口
3.1 UART (type=1)
| 字段 | 含义 | 取值 |
|---|---|---|
pins[0] | RX(接收) | 任意有效 GPIO |
pins[1] | TX(发送) | 任意有效 GPIO |
params.baudRate | 波特率 | 1 ~ 5000000,常用 9600/115200 |
params.dataBits | 数据位 | 5~8 |
params.stopBits | 停止位 | 1 或 2 |
params.parity | 校验位 | 0=无 / 1=奇 / 2=偶 |
示例:
{ "id": "uart0", "name": "串口0-调试", "type": 1, "enabled": true,
"pins": [1, 3],
"params": { "baudRate": 115200, "dataBits": 8, "stopBits": 1, "parity": 0 } }注意:ESP32 默认 Serial 映射 GPIO1/3(USB 调试)。Modbus RTU 通常使用 Serial2(GPIO16/17)。
3.2 I2C (type=2)
| 字段 | 含义 | 取值 |
|---|---|---|
pins[0] | SDA | 推荐 GPIO21 |
pins[1] | SCL | 推荐 GPIO22 |
params.frequency | 时钟频率 | 仅支持 100000 / 400000 / 1000000 |
params.address | 从机地址 | 0~127,主机模式为 0 |
params.isMaster | 是否主机 | true(推荐) |
示例:
{ "id": "i2c", "name": "I2C总线", "type": 2, "enabled": false,
"pins": [21, 22],
"params": { "frequency": 100000, "address": 0, "isMaster": true } }3.3 SPI (type=3)
| 字段 | 含义 |
|---|---|
pins[0] | MISO |
pins[1] | MOSI |
pins[2] | SCK |
pins[3] | CS |
params.frequency | 1 ~ 80 MHz |
params.mode | 0~3 |
params.msbFirst | true = MSB 先 |
3.4 CAN / USB(未实现驱动)
配置数据会被保存,但 setupHardware 会打印 not yet implemented。使用前需业务层自行实现。
4. GPIO 接口
4.1 数字输入 / 输出 (type=11~14)
| 类型 | 说明 | 典型用途 |
|---|---|---|
11 GPIO_DIGITAL_INPUT | 高阻输入,外部需上/下拉 | 编码器 A/B 相 |
12 GPIO_DIGITAL_OUTPUT | 推挽输出 | 继电器、LED |
13 GPIO_DIGITAL_INPUT_PULLUP | 内部上拉 | 按键(按下接 GND) |
14 GPIO_DIGITAL_INPUT_PULLDOWN | 内部下拉 | 按键(按下接 VCC) |
按键事件:只有 type=13/14 会被
PeriphExecScheduler::checkButtonEvents扫描,支持button_click/button_double_click/button_long_press_2s/5s/10s。
4.2 模拟输入 (type=15) / ADC (type=26)
- ESP32 classic:ADC1 (GPIO32~39) 推荐用于 WiFi 同时工作;ADC2 与 WiFi 冲突。
analogRead(pin)返回 0~4095(12 位)。
4.3 PWM 输出 (type=17) / 模拟输出 (type=16) / 舵机 (type=41)
| 参数 | 说明 | 约束 |
|---|---|---|
pwmChannel | LEDC 通道 | 0 ~ CHIP_MAX_PWM_CH-1(ESP32 为 16) |
pwmFrequency | 频率 Hz | freq × 2^resolution ≤ 80MHz |
pwmResolution | 分辨率位数 | 1~16 |
defaultDuty | 默认占空比 | 0 ~ (2^resolution - 1) |
频率/分辨率组合限制(示例):
- 1kHz × 13 位 = 8.192M ✅
- 40kHz × 12 位 = 163.84M ❌
4.4 中断 (type=18/19/20)
当前实现:isrHandler 仅记录触发引脚号,尚未接入 FreeRTOS 队列分发给主循环。上层业务使用按键事件(type=13/14)替代。
4.5 触摸 (type=21)
仅 CHIP_HAS_TOUCH 芯片有效(ESP32 classic 支持 T0~T9)。
5. 模拟信号接口
5.1 DAC (type=27)
- 硬件限制:ESP32 classic 仅 GPIO25/26 有真实 DAC;其他芯片/引脚会被拒绝。
- 输出范围:8 位(0~255),对应 0V~VDD。
5.2 ADC (type=26)
与 GPIO_ANALOG_INPUT 等价,可用 params.attenuation(0~3)与 params.resolution(9~12)区分。
6. 调试接口
JTAG=31 / SWD=32 为类型标记位。ESP32 的 JTAG 引脚固定为 GPIO12~15,开启后会影响这些引脚的普通 GPIO 功能。
7. 专用外设
7.1 LCD/OLED 显示屏 (type=36)
实现状态:✅ 完整实现。默认
esp32环境启用(FASTBEE_ENABLE_LCD=1)。
支持的控制器(由 U8g2 库覆盖):
- SSD1306(128×64 / 128×32 OLED,I²C 0x3C)
- SH1106(128×64 OLED)
- 其他 U8g2 支持的字符/图形 LCD
参数:
| 字段 | 含义 | 取值 |
|---|---|---|
pins[0] | SDA(I²C)/ MOSI(SPI) | |
pins[1] | SCL(I²C)/ SCK(SPI) | |
pins[2] | CS(仅 SPI) | 可选 |
pins[3] | DC(仅 SPI) | 可选 |
params.width | 宽 | 128 |
params.height | 高 | 64 / 32 |
params.interface | 接口 | 0=并口 / 1=SPI / 2=I2C(默认) |
示例:
{ "id": "oled_display", "name": "OLED显示屏", "type": 36, "enabled": true,
"pins": [23, 22],
"params": { "width": 128, "height": 64, "interface": 2 } }相关规则动作:ACTION_DISPLAY_CUSTOM(OLED 自定义显示,支持多行文本 + 变量插值)。详见 oled_usage_guide.md。
7.2 TM1637 数码管 (type=47)
实现状态:✅ 已实现,自写 bit-bang 驱动(
SevenSegmentDriver),默认esp32环境启用。
| 字段 | 含义 |
|---|---|
pins[0] | CLK |
pins[1] | DIO |
params.brightness | 亮度 0~7 |
约束:CLK/DIO 与其他外设不可共用引脚。由按键引脚冲突的历史教训,务必为数码管单独分配 GPIO。
7.3 通用传感器 (type=38) / 单总线 (type=44)
| 子类 | 引脚 | 说明 |
|---|---|---|
| DHT11/DHT22 | 1 个 DATA | 温湿度 |
| DS18B20 | 1 个 DQ(1-Wire) | 温度 |
通过外设执行动作 ACTION_SENSOR_READ 读取并缓存。需启用 FASTBEE_ENABLE_SENSOR_DRIVER(默认开)。
7.4 保留位 (type=46)
旧版专用蜂鸣器类型已移除,type=46 仅作为历史编号保留,Web 不再提供新增入口。
7.5 WS2812B / NeoPixel 灯珠 (type=45)
使用 ESP32 RMT 外设发送 WS2812B GRB 时序,不依赖第三方 NeoPixel 库。pins[0] 接 WS2812B 的 DIN,默认测试模板为 ws2812b,GPIO4,1 颗灯珠,亮度 64,默认禁用。
| 字段 | 含义 | 默认值 / 范围 |
|---|---|---|
pins[0] | DIN 数据引脚 | 有效输出 GPIO |
params.count | 灯珠数量 | 默认 1,最大 64 |
params.brightness | 全局亮度 | 默认 64,范围 0~255 |
外设执行通过 ACTION_CALL_PERIPHERAL 控制:
| actionValue 示例 | 行为 |
|---|---|
{"periphId":"ws2812b","action":"color","value":"#ff0000"} | 显示红色 |
{"periphId":"ws2812b","action":"off"} | 熄灭 |
{"periphId":"ws2812b","action":"rainbow"} | 推进一次赤橙黄绿青蓝紫循环 |
{"periphId":"ws2812b","action":"brightness","value":"96"} | 设置亮度 |
7.6 舵机 (type=41)
使用 LEDC 50Hz PWM,脉宽 0.5ms~2.5ms 对应 0°~180°。
7.7 步进电机 (type=42)
面向 28BYJ-48 + ULN2003 一类四相步进电机驱动板,pins[0..3] 按顺序接 ULN2003 的 IN1, IN2, IN3, IN4。驱动采用 8 拍半步序列,通过 Ticker 非阻塞输出,不会在外设执行动作里长时间阻塞 Web 服务。
| 字段 | 含义 | 默认值 / 范围 |
|---|---|---|
pins[0] | IN1 | 有效 GPIO |
pins[1] | IN2 | 有效 GPIO |
pins[2] | IN3 | 有效 GPIO |
pins[3] | IN4 | 有效 GPIO |
params.stepsPerRevolution | 每圈步数 | 默认 2048 |
params.speed | 默认转速 RPM | 默认 8,最大 30 |
外设执行可通过 ACTION_CALL_PERIPHERAL 控制该外设,支持 forward、reverse、stop、faster、slower、setSpeed、direction 等动作。
安全提醒:经典 ESP32 的 GPIO9/10/11 通常被 Flash SPI 占用,固件会拒绝在当前芯片保留引脚上启用步进电机,避免误配置导致重启。GPIO 11/10/9/13 更适合 ESP32-S3;经典 ESP32 建议换成空闲 GPIO。
7.8 SDIO / 摄像头 / 以太网 / 编码器
当前仅保存配置,底层驱动未实现。需要使用请自行扩展 PeripheralManager::setupHardware。
8. Modbus 外设
8.1 MODBUS_DEVICE (type=51)
虚拟外设,不占用本地 GPIO,通过 RS485 / Modbus TCP 总线通信。
params.modbus.* 字段 | 含义 | 取值 |
|---|---|---|
slaveAddress | 从站地址 | 1~247 |
deviceType | 设备类型 | 0=继电器 / 1=PWM / 2=PID 等 |
controlProtocol | 控制协议 | 0=线圈 FC05 / 1=寄存器 FC06 |
coilBase | 线圈基地址 | |
pwmRegBase | PWM 寄存器基地址 | |
ncMode | 常闭模式(状态反转) | bool |
注意事项:
- Modbus 外设不通过
peripherals.json持久化,由protocol.json统一管理。 - 物理总线(RS485)需要一条 UART + DE 控制引脚,DE 引脚不可被按键或其他 GPIO 外设复用。
- 参见历史 Lesson:Modbus dePin 与按键引脚不可复用。
9. 虚拟/逻辑外设
9.1 DEVICE_EVENT (type=60)
- 无引脚、无硬件。
- 仅作为规则系统中的"事件发射源",触发后通过 MQTT
DEVICE_EVENT主题上报。 - 配置时
pinCount=0,pins可省略,校验只校验id/name非空。
典型用途:系统状态变更、用户动作、组合事件(如"连续三次按键单击触发警报")。
10. 配置结构与字段说明
参数矩阵适合和本章一起使用:先确认通用字段 id、type、pins、enabled,再按外设类型检查 params 中的地址、量程、校准、频率或动作边界。
peripherals.json 顶级结构:
{
"peripherals": [
{
"id": "唯一ID(英文/数字/下划线)",
"name": "显示名",
"type": 36, // PeripheralType 枚举值
"enabled": true, // 仅 enabled=true 的外设会占用引脚
"pins": [21, 22], // 按顺序排列,未使用位设为 255 或省略
"params": { // 类型特定参数(见各章)
"width": 128,
"height": 64,
"interface": 2
}
}
]
}10.1 通用约束
id必须全局唯一;改名(name)可直接 PUT,改 ID 需先 DELETE 后 POST。pins[]最大 8 个,pinCount自动从非 255 的数量推断。- 禁用 (
enabled=false) 的外设不占引脚——允许多外设声明同一引脚但只启用其中一个。 - 保留引脚(Flash SPI、Boot、USB D+/D-)由
ChipConfig.h定义,validatePinForType会拒绝越界。
10.2 引脚冲突检测
- 增加或启用外设时,
checkPinConflict会扫描所有已启用的非 Modbus 外设。 - 若检测到残留缓存(
pinToPeripheral与peripherals不一致),会自动rebuildPinMapping一次并重试。
11. 功能编译开关(FeatureFlags)
关键开关位于 include/core/FeatureFlags.h,可在 platformio.ini 的 build_flags 中覆盖:
| 宏 | 默认值 | 说明 |
|---|---|---|
FASTBEE_ENABLE_LCD | 0(esp32=1) | U8g2 LCD/OLED 驱动 |
FASTBEE_ENABLE_SEVEN_SEGMENT | 0(esp32=1) | TM1637 驱动 |
FASTBEE_ENABLE_LED_SCREEN | 0 | NeoPixel 灯带 |
FASTBEE_ENABLE_SENSOR_DRIVER | 1 | DHT/DS18B20 |
FASTBEE_ENABLE_MODBUS | 1 | Modbus RTU/TCP |
FASTBEE_ENABLE_PERIPH_EXEC | 1 | 外设执行规则(定时/按键/事件) |
11.1 预设环境(来自 platformio.ini)
| 预设 | LCD | TM1637 | NeoPixel | CoAP |
|---|---|---|---|---|
esp32 默认 | ✅ | ✅ | ❌ | ❌ |
minimal | ❌ | ❌ | ❌ | ❌ |
full | ✅ | ✅ | ✅ | ✅ |
12. 常见问题与排错
12.1 "引脚 X 已被外设 '<未知>' 占用"
原因:pinToPeripheral 缓存残留(已在 addPeripheral 中加入自动 rebuildPinMapping 回退)。 排查:
- 确认
peripherals.json中是否真的存在该引脚的启用外设。 - 串口观察日志
stale pin mapping detected, rebuilding cache。 - 若仍报冲突,说明目标外设确实启用中,需先禁用或改引脚。
12.2 按键事件长时间运行后失效
历史根因(已修复):
dispatchAsync自愈条件盲区(startTime缺失时永久 skip)。dispatchByRuleId锁超时无重试,checkTimerTriggers持锁 100ms 期间按键事件被丢弃。
当前实现:dispatchAsync 检测 startTimeMissing || stuck>60s 自动清理;dispatchByRuleId 3 次 × 50ms 重试。详见 Lesson:FastBee-Arduino按键失效自愈机制修复。
12.3 TM1637 与按键共用引脚
禁止。TM1637 bit-bang 驱动会频繁翻转 CLK/DIO,与按键扫描冲突导致双向失效。 方案:为 TM1637 单独分配 2 个 GPIO(典型 GPIO18/19)。
12.4 Modbus dePin 与按键/GPIO 冲突
Modbus RTU 的 RS485 DE(Direction Enable)引脚由 protocol.json 中 modbus.dePin 配置,不得与 peripherals.json 中任一启用外设的引脚重复。重复会导致通信方向切换异常或按键失效。
12.5 DAC 写入失败
仅 ESP32 classic 的 GPIO25 / GPIO26 支持硬件 DAC。ESP32-S3/C3 不支持,启用会返回 DAC not supported on this chip。
12.6 OLED 不亮
排查顺序:
- I²C 地址:大多数 SSD1306 为
0x3C,少数0x3D(需手动在LCDManager中调整)。 - 引脚:SDA/SCL 顺序不可颠倒。
- 电源:0.96" OLED 典型工作电压 3.3V,电流 20mA 内。
params.interface必须为2(I²C)。
12.7 LCD vs LED 容易混淆
| LCD/OLED (type=36) | LED 灯带 (type=45, NeoPixel) | |
|---|---|---|
| 用途 | 字符/图形显示 | 多彩像素灯 |
| 接口 | I²C / SPI | RMT(单信号线 WS2812B) |
| 驱动库 | U8g2 | Adafruit NeoPixel |
| 默认启用 | ✅ esp32 启用 | ❌ 默认禁用 |
如果你要驱动 "一只 LED 单灯",应使用 GPIO_DIGITAL_OUTPUT (type=12) 或 GPIO_PWM_OUTPUT (type=17);如果要 "WS2812 灯带",使用 NEO_PIXEL (type=45);显示屏才是 LCD (type=36)。
13. 最佳实践
13.1 命名
id用 snake_case 英文(如oled_display、key1、tm1637_01),便于规则引擎脚本引用。name用中文/英文均可,面向用户展示。
13.2 引脚分配策略
- 优先使用安全引脚:GPIO4/5/16/17/18/19/21/22/23/25/26/27/32/33。
- 保留:GPIO0(Boot)、GPIO1/3(UART0 调试)、GPIO6-11(Flash)。
- 输入专用:GPIO34~39,只能做输入。
- 为按键预留独立 GPIO,不与 TM1637/OLED/Modbus DE 共用。
13.3 配置演进
- 修改外设类型或引脚时,先在 Web UI 禁用 → 保存 → 重新启用,避免热切换时残留中断。
- 规则配置 (
periph_exec.json) 引用的外设 ID 变更时,需同步更新targets[]。
13.4 调试手段
- 串口日志:
Peripheral Manager: ...前缀可过滤。 - Web → 外设管理:一览所有外设、实时状态、引脚占用。
pio device monitor -p COM6 -b 115200。
13.5 扩展新外设
- 在
PeripheralTypes.h添加枚举值(遵循区段 ID 规则)。 - 更新
getPeripheralTypeName/parsePeripheralType/getPeripheralPinCount。 - 在
PeripheralManager::setupHardware添加初始化分支。 - 在
web-src/pages/modals.html添加<option>及data-i18n。 - 在
web-src/i18n/i18n-zh-CN.js/i18n-en.js添加翻译键。 - (可选)在
web-src/modules/runtime/periph-exec-form.js添加规则动作支持。
提示:若要扩展的是传感器类外设(需周期性读取温度/湿度/光照等数值),推荐优先使用第 14 章的
ISensorDriver驱动接口,无需侵入PeripheralManager核心代码。
14. 传感器驱动扩展(ISensorDriver)
本章节描述本次优化新增的传感器驱动抽象接口与热插拔注册机制,目标是把传感器硬件读取逻辑从
PeripheralManager/PeriphExec的硬编码分支中解耦,便于后续新增 SHT31、BMP280、SCD41 等器件时不再修改核心调度层。
14.1 设计目标
- 将"硬件初始化 + 周期读取 + 多通道输出"封装到独立驱动类。
- 使用静态注册宏在
main()之前完成自注册,新增驱动只需"新建一个头文件 + 包含一次"。 - 驱动注册表使用固定容量静态数组(
MAX_SENSOR_DRIVERS = 8),零动态分配、零碎片。 - 支持最多 4 通道读取(如 DHT 的温度 + 湿度),通道具名(name/unit)方便前端渲染。
14.2 核心接口
头文件:include/core/interfaces/ISensorDriver.h
struct SensorReading {
bool success = false;
float values[4] = {0}; // 最多 4 通道
uint8_t channelCount = 0;
unsigned long timestamp = 0;
// 语义化访问
float temperature() const { return channelCount > 0 ? values[0] : NAN; }
float humidity() const { return channelCount > 1 ? values[1] : NAN; }
};
class ISensorDriver {
public:
virtual ~ISensorDriver() = default;
virtual const char* getName() const = 0; // 驱动类型名,如 "sht31"
virtual uint8_t getChannelCount() const = 0; // 通道数 1~4
virtual const char* getChannelName(uint8_t ch) const = 0; // "temperature" / "humidity" 等
virtual const char* getChannelUnit(uint8_t ch) const = 0; // "℃" / "%" / "lux" 等
virtual bool init(uint8_t pin, const char* params = nullptr) = 0; // params 为 JSON 字符串,可选
virtual bool read(SensorReading& reading) = 0;
virtual void deinit() = 0;
virtual unsigned long getMinInterval() const { return 1000; } // 最小采样间隔 (ms)
};14.3 注册机制
头文件:include/core/DriverRegistry.h
| 要素 | 说明 |
|---|---|
DriverRegistry::getInstance() | 单例,全局唯一 |
registerDriver(name, factory) | 由静态构造函数自动调用,通常不需要手动调用 |
createDriver(name) | 按名称创建驱动实例,返回 ISensorDriver*,失败返回 nullptr |
hasDriver(name) | 判断驱动是否已注册 |
FASTBEE_REGISTER_SENSOR(name, Class) | 宏,在文件末尾使用一次即可完成自注册 |
注册表内部是 std::array<SensorDriverEntry, 8>,满载时 registerDriver 返回 false(构建期可见),避免运行时失败。
14.4 编写自定义驱动
以 include/peripherals/drivers/SHT31Driver.h 为模板:
#include "core/interfaces/ISensorDriver.h"
#include "core/DriverRegistry.h"
class MySensorDriver : public ISensorDriver {
public:
const char* getName() const override { return "my_sensor"; }
uint8_t getChannelCount() const override { return 2; }
const char* getChannelName(uint8_t ch) const override {
return ch == 0 ? "temperature" : "humidity";
}
const char* getChannelUnit(uint8_t ch) const override {
return ch == 0 ? "℃" : "%";
}
bool init(uint8_t pin, const char* params) override {
// TODO: 初始化 I2C / OneWire / 引脚
return true;
}
bool read(SensorReading& r) override {
r.values[0] = 25.3f;
r.values[1] = 60.0f;
r.channelCount = 2;
r.success = true;
r.timestamp = millis();
return true;
}
void deinit() override {}
unsigned long getMinInterval() const override { return 2000; }
};
// 自动注册:在任意 .cpp 包含此头文件一次即可
FASTBEE_REGISTER_SENSOR("my_sensor", MySensorDriver);关键点:
- 驱动头文件放在
include/peripherals/drivers/目录。 - 需要被
src/main.cpp(或任一被链接的.cpp)显式#include一次,触发静态对象构造 → 完成注册。 - 使用方:
ISensorDriver* drv = DriverRegistry::getInstance().createDriver("my_sensor");
14.5 与现有传感器逻辑的关系
- 当前状态:
PeriphExec中对DHT11/DHT22/DS18B20等的硬编码读取分支仍在使用,未迁移到ISensorDriver,功能与兼容性不受影响。 - 建议策略:
- 新增器件(SHT31/BMP280/SCD41/BH1750 等)优先使用
ISensorDriver。 - 存量器件待完整回归后按需迁移,不强制。
- 新增器件(SHT31/BMP280/SCD41/BH1750 等)优先使用
- 容量提升:若 8 种驱动不够,修改
DriverRegistry.h中的MAX_SENSOR_DRIVERS常量并重新编译。
参考文档
oled_usage_guide.md— OLED 自定义显示规则modbus_usage_guide.md— Modbus 使用指南periph_exec_flow.md— 外设执行规则流程script-guide.md— 规则脚本手册